Eventuella fordonsbackar (dvs. svängar) genom att använda ett nettomoment. Vad som är intressant med en quadcopter är inte bara hur den käkar, utan hur den käkar och inte rullar, tonar eller klättrar samtidigt .
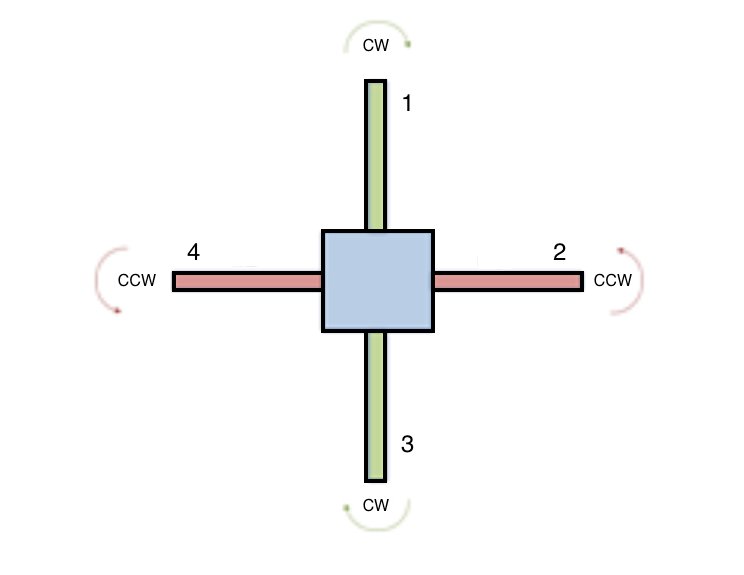
För att förstå hur detta fungerar måste vi kort titta på matematiken. Vi använder en pluskonfiguration, men egentligen fungerar alla mutirotor-konfigurationer.
Saken att behålla i åtanke är att dragkraft och vridmoment är relaterade till propellerhastigheter. Om du påskyndar en propeller är det intuitivt uppenbart att det kommer att skapa mer dragkraft. Och om du snurrar snabbare behöver du mer vridmoment. Så att ändra motorhastigheter ändrar nätkrafterna och vridmomentet på flygplanet.
(Pedantiskt går det med hastighetens kvadrat. Så om du fördubblar hastigheten fyrdubblar du dragkraften och vridmomentet. Men det är inte viktigt för den här analysen.)
Här är körnivån på hög nivå. Om du någonsin har trasslat med blandare kommer du att märka att 4x4-matrisen i mitten ser riktigt bekant ut:
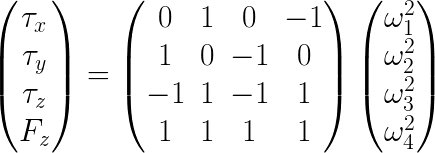
Vad det här är att det kartlägger rotorhastigheter (kvadrat) till vridmoment kring rull-, lutnings- och giraxlarna, liksom nätets vertikala dragkraft.
För att sväva, låt oss anta att alla motorer snurrar i samma hastighet , W . Så W = w1 = w2 = w3 = w4
Yaw
Vad händer om vi påskyndar den första och tredje och saktar ner den andra och fjärde med samma (kvadrat) mängd dW ?
vridmoment_x = 0 * (W ^ 2 + dW) + 1 * (W ^ 2 - dW) + 0 * (W ^ 2 + dW) - 1 * (W ^ 2 + dW ) = 0 vridmoment_y = 1 * (W ^ 2 + dW) + 0 * (W ^ 2 - dW) - 1 * (W ^ 2 + dW) + 0 * (W ^ 2 + dW) = 0 vridmoment_y = 1 * (W ^ 2 + dW) - 1 * (W ^ 2 - dW) + 1 * (W ^ 2 + dW) - 1 * (W ^ 2 + dW) = 4 * dWF_z = 1 * (W ^ 2 + dW) + 1 * (W ^ 2 - dW) + 1 * (W ^ 2 + dW) + 1 * (W ^ 2 + dW) = 4 * W ^ 2
Så nettokraften förändras inte (all dW avbryts), och inte heller rullar nätet och tonhöjden, men voila vi har 4 * dW vridmoment!
För fullständighet, här är vad som händer när du också vill ändra de andra axlarna.
Pitch
Låt oss byta fram- och bakmotorer med samma (kvadrat) hastighet, men vi lämnar de två andra motorerna ensamma:
vridmoment_x = 0 * (W ^ 2 + 0) + 1 * (W ^ 2 - dW) + 0 * (W ^ 2 + 0) - 1 * (W ^ 2 + dW) = 2 * dWtorque_y = 1 * (W ^ 2 + 0) + 0 * (W ^ 2 - dW) - 1 * (W ^ 2 + 0) + 0 * ( W ^ 2 + dW) = 0 vridmoment_z = 1 * (W ^ 2 + 0) - 1 * (W ^ 2 - dW) + 1 * (W ^ 2 + 0) - 1 * (W ^ 2 + dW) = 0F_z = 1 * (W ^ 2 + 0) + 1 * (W ^ 2 - dW) + 1 * (W ^ 2 + 0) + 1 * (W ^ 2 + dW) = 4 * W ^ 2
Lägg märke till att, igen, förblir z-dragkraften konstant, men den här gången visas bara ett stigande vridmoment.
Rulla
Låt oss byta vänster och höger motor med samma (kvadrat) hastighet, men vi lämnar de andra två motorerna ensamma:
vridmoment_x = 0 * (W ^ 2 + dW) + 1 * (W ^ 2 + 0) + 0 * (W ^ 2 + dW) - 1 * (W ^ 2 + 0) = 0 vridmoment_y = 1 * (W ^ 2 + dW) + 0 * (W ^ 2 + 0) - 1 * (W ^ 2 + dW ) + 0 * (W ^ 2 + 0) = 2 * dWtorque_z = 1 * (W ^ 2 + dW) - 1 * (W ^ 2 + 0) + 1 * (W ^ 2 + dW) - 1 * (W ^ 2 + 0) = 0F_z = 1 * (W ^ 2 + dW) + 1 * (W ^ 2 + 0) + 1 * (W ^ 2 + dW) + 1 * (W ^ 2 + 0) = 4 * W ^ 2
Som alltid igen förblir z-dragkraften konstant, men den här gången visas bara ett rullande vridmoment.
Drivkraft
Slutligen, vad händer om vi påskyndar alla fyra motorerna med samma (kvadrat) hastighet?
vridmoment_x = 0 * (W ^ 2 + dW) + 1 * (W ^ 2 + dW) + 0 * (W ^ 2 + dW) - 1 * (W ^ 2 + dW) = 0 vridmoment_y = 1 * (W ^ 2 + dW) + 0 * (W ^ 2 + dW) - 1 * (W ^ 2 + dW) + 0 * (W ^ 2 + dW) = 0 vridmoment_z = 1 * (W ^ 2 + dW) - 1 * (W ^ 2 + dW) + 1 * (W ^ 2 + dW) - 1 * (W ^ 2 + dW) = 0F_z = 1 * (W ^ 2 + dW) + 1 * (W ^ 2 - dW) + 1 * (W ^ 2 + dW) + 1 * (W ^ 2 + dW) = 4 * W ^ 2 + 4 * dW
Så bara i det här fallet ser vi en ökning av vertikal dragkraft (med 4 * dW ). Lägg märke till hur nettomomentet kring varje axel tar bort.